
Ograniczenia asystenta unikania kolizji z przodu
W następujących okolicznościach asystent unikania kolizji z przodu może działać nieprawidłowo lub w nieoczekiwany sposób:
-
Czujnik lub obszar w jego pobliżu jest zanieczyszczony lub uszkodzony.
-
Temperatura otoczenia kamery widoku z przodu jest wysoka lub niska z powodu otaczających warunków.
-
Obiektyw kamery jest zasłonięty przez przyciemnienie, folię lub powłokę na szybie przedniej, uszkodzoną szybę lub inne przedmioty (np. naklejkę, owady itp.) na szybie
-
Wilgoć nie została usunięta z szyby przedniej lub powstało oblodzenie
-
Szyba jest spryskiwana płynem do spryskiwaczy przez długi czas lub działają wycieraczki.
-
Jazda podczas intensywnych opadów deszczu lub śniegu albo w gęstej mgle.
-
Intensywne światło słoneczne w polu widzenia kamery widoku z przodu.
-
Światła latarni ulicznych lub pojazdów nadjeżdżających z przeciwka odbijają się na mokrej nawierzchni drogi, np. od kałuży
-
Na desce rozdzielczej znajduje się przedmiot
-
Pojazd jest holowany.
-
Otoczenie jest bardzo jasne lub ciemne, np. w tunelu itp.
-
Jasność oświetlenia nagle zmienia się przy wjeżdżaniu do tunelu lub wyjeżdżaniu z niego.
-
Jasność oświetlenia na zewnątrz jest niska i reflektory są wyłączone lub słabo świecą.
-
Tylko część pojazdu, jednośladu z napędem, pieszego lub rowerzysty jest wykrywana.
-
Poprzedzającym pojazdem lub jednośladem z napędem jest autobus, duży samochód ciężarowy, samochód z ładunkiem o nietypowym kształcie, przyczepą itp.
-
Poprzedzający pojazd lub jednoślad z napędem nie ma tylnych świateł lub są one usytuowane w nietypowym miejscu itp.
-
Jasność oświetlenia na zewnątrz jest niska i tylne światła są wyłączone lub słabo świecą
-
Tyl pojazdu poprzedzającego jest niewielki lub pojazd wygląda nietypowo, np. gdy jest pochylony lub obrócony albo widoczny jest bok pojazdu itp.
-
Pojazd poprzedzający ma mały lub duży prześwit
-
Pojazd, zasilany rower na dwóch kółkach, pieszy lub rowerzysta nagle znajduje się przed pojazdem
-
Obszar zderzaka w pobliżu przedniego radaru został uderzony, jest uszkodzony lub przedni radar jest nieprawidłowo ustawiony
-
Temperatura otoczenia przedniego radaru jest wysoka lub niska.
-
Podczas przejeżdżania przez tunel lub pod żelaznym wiaduktem
-
Podczas jazdy na dużych obszarach o ograniczonym ruchu i małej liczbie obiektów (np. pustynia, pola, przedmieścia itp.).
-
Podczas jazdy w pobliżu obszarów, w których powietrze zawiera metale, np. w pobliżu obszaru budowy, linii kolejowej itp.
-
W pobliżu znajduje się materiał bardzo dobrze odbijający wiązkę przedniego radaru, taki jak bariera, pojazd obok itp.
-
Rowerzysta przed pojazdem jedzie na rowerze wykonanym z materiału, który nie odbija wiązki przedniego radaru.
-
Poprzedzający pojazd lub jednoślad z napędem jest wykrywany z opóźnieniem.
-
Poprzedzający pojazd lub jednoślad z napędem został nagle przesłonięty.
-
Poprzedzający pojazd lub zasilany rower na dwóch kółkach nagle zmienia pas ruchu lub gwałtownie zmniejsza prędkość
-
Poprzedzający pojazd lub jednoślad z napędem jest zniekształcony.
-
Pojazd poprzedzający jest pokryty śniegiem
-
Kierowca zjeżdża z pasa ruchu lub wraca na niego.
-
Nierówny sposób prowadzenia pojazdu
-
Pojazd użytkownika znajduje się na rondzie, a poprzedzający pojazd lub jednoślad z napędem nie jest wykrywany.
-
Pojazd użytkownika stale jedzie po okręgu.
-
Poprzedzający pojazd lub jednoślad z napędem ma nietypowy kształt
-
Poprzedzający pojazd lub jednoślad z napędem jedzie w górę lub w dół
-
Pieszy lub rowerzysta nie jest prawidłowo wykrywany, gdy na przykład pochyla się lub nie porusza się w pozycji wyprostowanej.
-
Pieszy lub rowerzysta nosi odzież lub akcesoria utrudniające jego wykrycie.
 OMV073233L
OMV073233LPowyższa ilustracja pokazuje obraz, który kamera widoku z przodu i przedni radar rozpozna jako pojazd, jednoślad z napędem, pieszego lub rowerzystę.
-
Pieszy lub rowerzysta z przodu porusza się bardzo szybko.
-
Pieszy lub rowerzysta z przodu jest niski lub pochylony.
-
Pieszy lub rowerzysta z przodu ma ograniczone możliwości poruszania się lub porusza się poprzecznie do kierunku jazdy.
-
Przed pojazdem jest grupa pieszych, rowerzystów lub tłum ludzi.
-
Odzież pieszego lub rowerzysty zlewa się z otoczeniem, co utrudnia jego wykrycie.
-
Trudno jest odróżnić pieszego lub rowerzystę od obiektów w otoczeniu o podobnym kształcie.
-
Pojazd przejeżdża obok pieszego, rowerzysty, sygnalizacji świetlnej, konstrukcji itp. w pobliżu skrzyżowania.
-
W przypadku jazdy w następujących warunkach/miejscach.
-
Jazda przez mgłę, dym lub zacieniony obszar
-
Podczas przejeżdżania przez tunel lub pod żelaznym wiaduktem
-
Podczas jazdy na dużych obszarach o ograniczonym ruchu i małej liczbie obiektów (np. pustynia, pola, przedmieścia itp.)
-
Jazda na parkingu
-
Podczas przejeżdżania przez punkt poboru opłat, roboty drogowe, podczas jazdy częściowo utwardzoną drogą, nierówną drogą, przez progi zwalniające itp.
-
Podczas jazdy w pobliżu obszarów, w których powietrze zawiera metale, np. w pobliżu obszaru budowy, linii kolejowej itp.
-
Podczas jazdy pochyloną lub krętą drogą itp.
-
Podczas jazdy drogą, na której na poboczu są drzewa lub latarnie uliczne
-
Podczas jazdy po wąskiej drodze z drzewami, trawą lub gęstymi krzakami na poboczu
-
Zakłócenia spowodowane falami elektromagnetycznymi, np. podczas jazdy w obszarze silnych fal radiowych lub zakłóceń elektromagnetycznych
-
-
Trudne warunki drogowe powodują nadmierne drgania podczas jazdy.
-
Wysokość pojazdu jest mała lub duża z powodu dużego obciążenia, nieprawidłowego ciśnienia w oponach itp.
Funkcje przejeżdżania przez skrzyżowanie, sygnalizacji zmiany pasa ruchu na przeciwny, sygnalizacji zmiany pasa ruchu na sąsiadujący i wymijającego wspomagania sterowania
-
Temperatura otoczenia tylnego lub przedniego narożnego czujnika radarowego jest wysoka lub niska
-
W pobliżu tylnego narożnego czujnika radarowego podłączono przyczepę lub zamontowano bagażnik rowery.
-
Przedni lub tylny narożny czujnik radarowy jest pokryty śniegiem, deszczem, błotem itp.
-
Powierzchnia zderzaka w pobliżu przedniego lub tylnego narożnego czujnika radarowego jest zasłonięta, np. naklejką, osłoną zderzaka, bagażnikiem rowerowym itp.
-
Obszar zderzaka w pobliżu przedniego lub tylnego narożnego czujnika radarowego został uderzony, jest uszkodzony lub czujnik radarowy jest nieprawidłowo ustawiony.
-
Przedni lub tylny narożny czujnik radarowy jest zablokowany przez inne pojazdy, ściany lub słupy.
-
Podczas jazdy wiaduktem na autostradzie.
-
Jazda po drodze zabudowanej z obu stron barierkami lub ścianami.
-
Inny pojazd lub jednoślad z napędem przejeżdża bardzo blisko za pojazdem lub omija go z zachowaniem małego odstępu
-
Inny pojazd lub jednoślad z napędem jedzie bardzo szybko i przejeżdża obok pojazdu w krótkim czasie
-
Pojazd jest wyprzedzany przez inny pojazd lub jednoślad z napędem
-
Pojazd ruszył w tym samym czasie, co inny pojazd lub jednoślad z napędem, a następnie przyspieszył
-
Pojazd lub jednoślad z napędem na sąsiednim pasie ruchu przemieszcza się o dwa pasy albo pojazd oddalony o dwa pasy ruchu przemieszcza się na sąsiedni pas
-
Wykrywany jest motocykl lub rower.
-
Wykrywany jest pojazd taki jak przyczepa płaska.
-
Wykrywany jest duży pojazd, taki jak autobus lub samochód ciężarowy.
-
W przypadku wykrycia niewielkiej poruszającej się przeszkody, np. pieszego, zwierzęcia, wózka sklepowego lub wózka dziecięcego
-
Wykrywany jest niski pojazd, np. samochód sportowy.
-
Pas ruchu jest słabo widoczny na skutek działania czynników zewnętrznych, takich jak deszcz śnieg, pył, piasek, olej lub kałuże.
-
Kolor linii wyznaczających pas ruchu zlewa się z drogą
-
W pobliżu pasa ruchu lub linii wyznaczających na drodze są podobnie wyglądające oznaczenia poziome
-
Na drogę padają cienie z pasa rozdzielającego jezdnie, drzew, barierek ochronnych, ekranów dźwiękochłonnych itp.
-
Liczba pasów zwiększa się lub zmniejsza, bądź linie wyznaczające pasy krzyżują się
-
Na drodze są więcej niż dwie linie wyznaczające pas ruchu.
-
Linie wyznaczające pas ruchu są skomplikowane lub w ich miejscu występują konstrukcje zastępcze, np. w miejscu prowadzenia robót drogowych.
-
Na drodze znajduje się inne oznakowanie poziome, np. oznakowanie przystanku autobusowego, przejścia dla pieszych i znaki drogowe.
-
Linie wyznaczające pas ruchu nagle znikają, np. na skrzyżowaniu.
-
Pas jest bardzo szeroki lub wąski.
-
Obecny jest krawężnik lub krawędzie drogi bez pasa ruchu.
-
Pojazd z przodu jedzie po jednej stronie linii wyznaczającej pas ruchu.
-
Odległość od samochodu znajdującego się z przodu jest bardzo mała
Szczegółowe informacje na temat ograniczeń wykrywania pojazdów za tylnymi narożnikami oraz przestróg dotyczących tylnego czujnika narożnego, patrz System wykrywania ryzyka kolizji w martwym polu (BCA).
|
Ograniczone działanie |
Szczegóły |
|---|---|
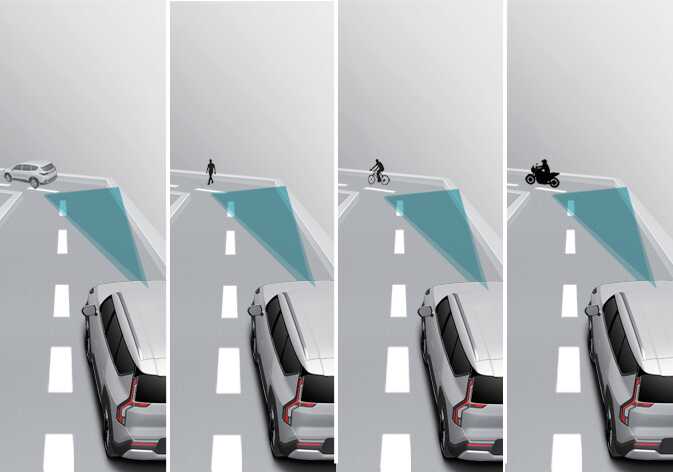 OMV073234L_4 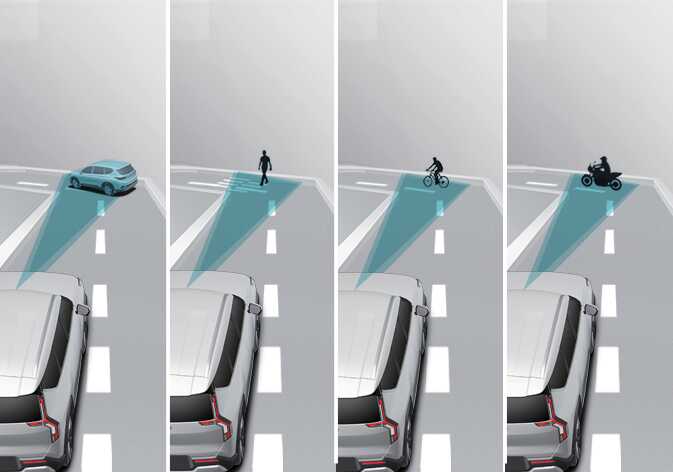 OMV073235L_4 |
Asystent unikania kolizji z przodu może nie wykrywać pojazdów, zasilanych rowerów na dwóch kółkach, pieszych lub rowerzystów z przodu podczas jazdy na krętych drogach. W takich warunkach skuteczność wykrywania czujników jest ograniczona. Może to skutkować brakiem ostrzeżenia i wspomagania hamowania lub sterowania (jeśli są na wyposażeniu), gdy jest to konieczne. Podczas pokonywania zakrętu należy zachować odległość wystarczającą do bezpiecznego zahamowania i w razie potrzeby wykonać manewr i nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości. Podczas jazdy po krętej drodze asystent unikania kolizji z przodu może wykryć pojazd, jednoślad z napędem, pieszego lub rowerzystę poruszającego się sąsiednim pasem ruchu lub poza pasem ruchu. W takim przypadku asystent unikania kolizji z przodu może wyemitować fałszywe ostrzeżenie i sterować hamulcami lub kierowaniem (jeśli są na wyposażeniu). Należy stale monitorować warunki na drodze. |
 OMV073236L_4 |
Asystent unikania kolizji z przodu może nie wykrywać pojazdów, jednośladów z napędem, pieszych lub rowerzystów podczas wjeżdżania na wzniesienie lub zjeżdżania z niego. W takich warunkach skuteczność wykrywania czujników jest ograniczona. Może to skutkować fałszywym ostrzeżeniem i niepotrzebnym wspomaganiem hamowania lub kierowania (jeśli jest stosowane) albo brakiem ostrzeżenia, wspomagania hamowania lub wspomagania kierowania (jeśli są na wyposażeniu), gdy jest to konieczne. Ponadto prędkość pojazdu może zostać gwałtownie zmniejszona, gdy pojazd, jednoślad z napędem, pieszy lub rowerzysta zostanie nagle wykryty. Podczas wjeżdżania na wzniesienie lub zjeżdżania z niego należy stale obserwować drogę i w razie potrzeby wykonać manewr i nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości. |
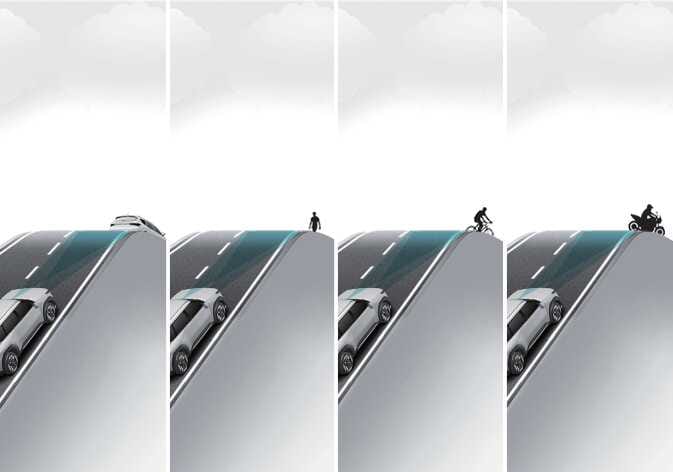
 OMV073158L 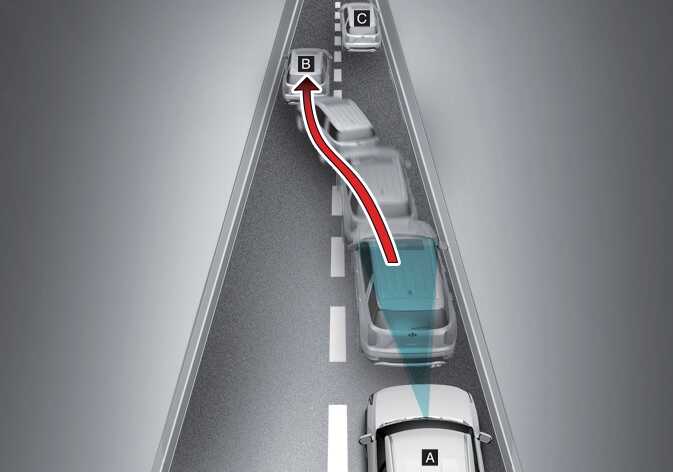 OMV073237L |
Gdy pojazd (2) wjeżdża na pas ruchu z sąsiedniego pasa, nie może zostać wykryty przez czujnik, dopóki nie znajdzie się w jego zasięgu wykrywania. Asystent unikania kolizji z przodu może nie wykryć natychmiast pojazdu, który gwałtownie zmienił pas ruchu. W takiej sytuacji należy zachować odległość wystarczającą do bezpiecznego hamowania i w razie potrzeby wykonać manewr i nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości. Gdy pojazd poprzedzający (2) zmieni pas ruchu na inny, asystent unikania kolizji z przodu może nie wykryć od razu kolejnego pojazdu (3), który znajdzie się przed samochodem użytkownika. W takiej sytuacji należy zachować odległość wystarczającą do bezpiecznego hamowania i w razie potrzeby wykonać manewr i nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości. |
 OMV073160L_2 |
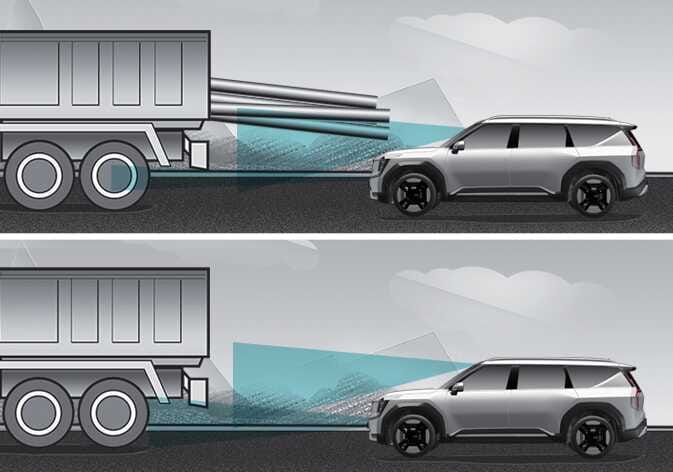
Gdy pojazd poprzedzający przewozi ładunek wystający do tyłu z kabiny lub jeśli ma duży prześwit, wymagane jest zachowanie szczególnej uwagi. Asystent unikania kolizji z przodu może nie wykrywać ładunku wystającego z pojazdu. We wszystkich powyższych sytuacjach należy zachować odległość od wysuniętego najbardziej do tyłu przedmiotu wystarczającą do bezpiecznego hamowania. W razie potrzeby wykonać manewr i nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości. |
-
Podczas holowania przyczepy lub innego pojazdu ze względów bezpieczeństwa zaleca się wyłączenie asystenta unikania kolizji z przodu.
-
Asystent unikania kolizji z przodu może zadziałać, gdy wykryje obiekty przypominające kształtem lub właściwościami pojazdy, jednoślady silnikowe, pieszych lub rowerzystów.
-
Asystent unikania kolizji z przodu nie wykrywa rowerów, motocykli ani mniejszych obiektów na kołach, takich jak wózki bagażowe, wózki zakupowe ani wózki dziecięce.
-
Asystent unikania kolizji z przodu może nie działać prawidłowo w warunkach silnych zakłóceń elektromagnetycznych.
-
Asystent unikania kolizji z przodu może nie działać przez 15 sekund od uruchomienia pojazdu lub kamery widoku z przodu.