智慧巡航控制系統的限制
智慧巡航控制可能因路況和交通狀況,在偵測與前車距離的能力方面有所限制。
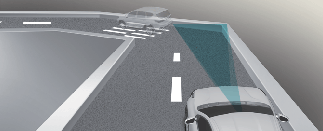
駕駛於彎道
-
在彎道中,智慧巡航控制可能不會偵測到在您車道上行駛的車輛,然後您的車輛會加速至設定速度。此外,如果突然識別到前方有車輛,車速將會急速減慢。
-
根據前方路況和行駛環境,踩下油門踏板或煞車踏板,選擇適合彎道的設定速度並調整您的車輛速度。
-
由於相鄰車道的車輛影響,車速可能會降低。根據前方路況和駕駛情況,踩下煞車踏板調整車速。踩下油門踏板並選擇適當的設定速度。檢查確定路況允許安全操作智慧巡航控制。

在傾斜的道路上行駛
-
在上坡或下坡道路上行駛期,智慧巡航控制可能不會檢測到在您車道上行駛的車輛,導致車輛加速至設定速度。此外,如果突然識別到前方有車輛,車速將會急速減慢。

-
根據前方路況和行駛環境,踩下油門踏板或煞車踏板,選擇適合斜坡的設定速度並調整您的車輛速度。
變換車道
-
如果是從相鄰車道駛入您所在車道的車輛,在進入感測器的偵測範圍前,感測器將無法偵測。
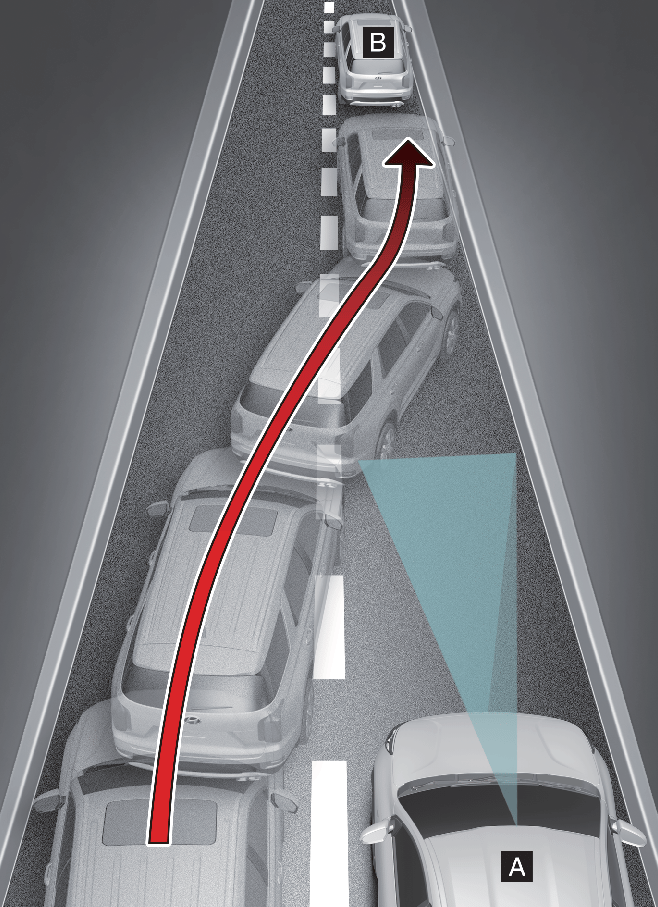
[A] : 您的車輛、[B]:變換車道的車輛
-
當車輛突然切入時,感測器可能無法立即偵測。務必注意交通、道路及行駛環境。
-
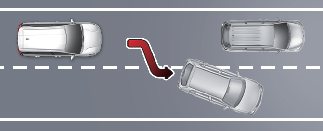
如果移入您車道的車輛速度比較慢,您的速度可能會降低以保持與前車的安全距離。
-
如果移入您車道的車輛速度比較快,您的車輛可能會加速至選定速度。
-
當前車消失時,您的車輛可能會加速。
-
當您接收到未偵測到前車的警告時,請小心駕駛。
識別車輛
感測器無法識別您所在車道上的某些車輛,例如:
-
窄小車輛,例如摩托車或自行車
-
車輛偏於一側
-
緩慢行駛或突然減速的車輛
-
停止的車輛
-
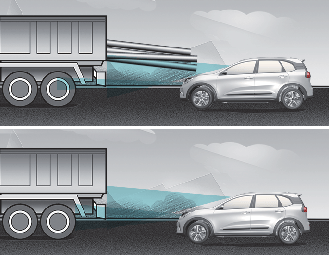
小型後輪廓車輛,如無負荷拖車
出現下列情況時,感測器無法正確識別前方車輛:
-
由於尾門超載導致車輛上翹時
-
使用方向盤轉彎時
-
行駛至車道的一側時
-
在狹窄車道或彎曲的道路上行駛時
根據前方路況和駕駛情況,踩下煞車踏板調整車速。
-
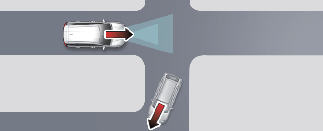
當車輛處於靜止狀態,且前車變換至隔壁車道,請在您的車輛開始移動時小心,因為其可能無法辨識前方停止的車輛。
在此情況下,您必須維持安全煞車距離,如有需要,踩踏煞車踏板降低駕駛速度,以維持安全距離。
-
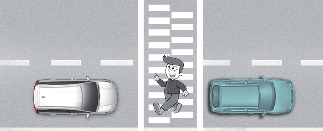
與前車保持一定距離時,一定要始終注意行人。
-
務必小心高度較高的車輛,或是載運貨物從後方穿出的車輛。

-
智慧巡航控制無法保證為每次緊急情況停車。
如有必要必須應用煞車器進行緊急停車。
-
根據路況和車速保持安全距離。如果高速行駛期間車輛距離太近,可能會導致嚴重碰撞事故。
-
智慧巡航控制無法辨識停止的車輛、行人或來車。一定要注意觀察前方以免出現意外或突發情況。
-
如果車輛行駛於陡坡或有拖車,智慧巡航控制可能會難以維持正卻的距離或速度。
-
當其他車輛在您前方頻繁變換車道,智慧巡航控制可能無法正常運作。一定要注意觀察前方以免出現意外或突發情況。
-
智慧巡航控制不能取代安全的駕駛動作,僅能作為方便的功能。駕駛有責任始終檢查車速,以及與前車之間的距離。
-
務必了解選擇的速度和車輛距離。
-
一定要保持足夠的煞車距離,如有必要,透過應用煞車進行車輛減速。
-
由於智慧巡航控制未必能識別複雜的駕駛情境,因此務必注意行駛環境並控制車輛速度。
-
基於安全操作,請在使用前仔細閱讀並遵循本手冊中的說明。
-
發出未繫好安全帶等其他警告聲時,智慧巡航控制警告聲可能無法響起。
-
以智慧巡航控制設定速度行駛時,可能無法偵測到在前方停車的車輛。如果您在這類情況下完全依賴智慧巡航控制,請特別小心,您可能會遇到碰撞風險。
-
請在拖車時關閉智慧巡航控制。
-
如果行駛並保持設定距離時前車消失,車輛可能會加速至設定速度。請注意任何可能的危險情況。
-
當行駛於濕滑路面時,請注意任何可能的危險情況。
-
當您快速通過行駛於隔壁車道的車輛時,請小心危險情況。
 小心
小心智慧巡航控制可能因電磁干擾而無法正常運作。