Advarsel om afgang af forankørende køretøj (for CUV) (hvis monteret)
Advarsel om afgang af forankørende køretøj (LVD) advarer føreren om, at køretøjet foran er stoppet, og at Intelligent fartpilot er i drift.
Funktionsindstilling og driftsbetingelser
Indstilling for funktion
Når motoren er tændt, slås Advarsel om afgang af forankørende køretøj til og er klart til at blive aktiveret, når der vælges 'Brugerindstillinger → Førerassistance → Kørehjælp → Advarsel om afgang af forankørende køretøj' på klyngen. Funktionen stopper driften, når indstillingen er deaktiveret. Hvis motoren imidlertid er slukket, tændes den igen, opretholder funktionen den forrige tilstand.
Forhold ved betjening
Mens Smart Cruise Control er i drift, stopper dit køretøj bag køretøjet foran, når det stopper. Meddelelsen vises på klyngen inden for 3 sekunder efter stop, og funktionen vil være i standby-position.
Funktionsaktivering

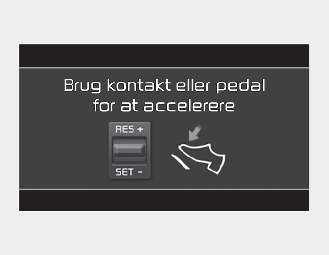
Hvis føreren ikke reagerer indenfor et bestemt tidsrum, efter at køretøjet foran er drejet fra, vises denne meddelelse på skærmen.
Begrænsninger for Intelligent fartpilot (Smart Cruise Control)
Intelligent fartpilot fungerer muligvis ikke korrekt, eller funktionen fungerer muligvis uventet under følgende omstændigheder:
-
Detektionssensoren eller omgivelserne er forurenet eller beskadiget
-
Spulervæske sprøjtes kontinuerligt, eller viskeren er tændt
-
Kameralinsen er forurenet på grund af tonet, filmet eller belagt forrude, beskadiget glas eller fastgjort af fremmed materiale (klistermærke, bug osv.) på ruden
-
Fugt fjernes eller fryses ikke på forruden
-
Synsfeltet på kameraet foran set er blokeret af solskin
-
Gadelys eller lys fra et modkørende køretøj reflekteres på den våde vejoverflade, f.eks. en pyt på vejen
-
Temperaturen omkring kameraet foran er høj eller lav
-
Et objekt placeres på Instrumentklyngen
-
Det omkringliggende er meget lyst
-
Det omkringliggende er meget mørkt, f.eks. I en tunnel osv.
-
Lysstyrken ændres pludselig, f.eks. Når man kommer ind eller forlader en tunnel
-
Lysstyrken udenfor er lav, og forlygterne er ikke tændt eller er ikke lys
-
Kørsel i kraftigt regn eller sne eller tyk tåge
-
Kørsel gennem damp, røg eller skygge
-
Kun en del af køretøjet registreres
-
Køretøjet foran har ingen baglygter, baglygter er placeret usædvanligt osv.
-
Lysstyrken udenfor er lav, og baglygterne er ikke tændt eller lyser ikke
-
Bagkøretøjet på det forreste køretøj er lille eller ser ikke normal ud (for ekesempel vippet, væltet osv.)
-
Det forreste køretøjs jordafstand er lav eller høj
-
Dit køretøj trækkes
-
Et køretøj klipper pludselig foran
-
Kørsel gennem en tunnel eller jernbanebro
-
En genstand, der reflekterer på den forreste radar, såsom en gelænder, køretøj i nærheden osv.
-
Kofangeren omkring den forreste radar er påvirket, beskadiget, eller den forreste radar er ude af position
-
Temperaturen omkring den forreste radar er høj eller lav
-
Kørsel i store områder, hvor der er få køretøjer eller strukturer (f.eks. ørken, eng, forstad osv.)
-
Køretøjet foran er lavet af materiale, der ikke reflekterer på den forreste radar
-
Kørsel i nærheden af en motorvejskørsel eller motorvejsskifte eller vejafgift
-
Kørsel på glat underlag på grund af sne, vandpytter, is osv.
-
Kørsel på en vej med kurver
-
Køretøjet foran registreres sent
-
Køretøjet foran er pludselig blokeret af en hindring
-
Køretøjet foran skifter pludselig bane eller reducerer pludselig hastigheden
-
Køretøjet foran er bøjet ud af form
-
Det forreste køretøjs hastighed er hurtig eller langsom
-
Med et køretøj foran skifter dit køretøj bane med lav hastighed
-
Køretøjet foran er dækket med sne
-
Du kører ustabilt
-
Du er på en rundkørsel, og køretøjet foran opdages ikke
-
Du kører konstant i en cirkel
-
Kørsel på en parkeringsplads
-
Kørsel gennem et anlægsområde, ikke-asfalteret vej, delvis asfalteret vej, ujævn vej, hastighedsstød osv.
-
Kørsel på en skråning, buet vej osv.
-
Kørsel gennem en vejkanten med træer eller gadelygter
-
De ugunstige vejforhold forårsager overdreven vibration af køretøjet under kørsel
-
Dit køretøjshøjde er lav eller høj på grund af store belastninger, unormalt dæktryk osv.
-
Kørsel gennem en smal vej, hvor træer eller græs eller vokset
-
Der er interferens af elektromagnetiske bølger, såsom at køre i et område med stærke radiobølger eller elektrisk støj
-
Kørsel på en vej med kurver
På kurver finder Smart Cruise Control muligvis ikke et køretøj i den samme bane og kan accelerere til den indstillede hastighed. Køretøjets hastighed kan også hurtigt falde, når køretøjet foran detekteres pludselig.
Vælg den korrekte indstillede hastighed på kurverne, og brug bremsepedalen eller gaspedalen i henhold til vejen og kørselsforholdene der ligger foran.
Dit køretøjs hastighed kan reduceres på grund af et køretøj i den tilstødende bane.
Træd på speederen og vælg den passende indstillede hastighed. Kontroller, at vejforholdene tillader sikker brug af intelligent fartpilot.
-
Kørsel på vej med hældning
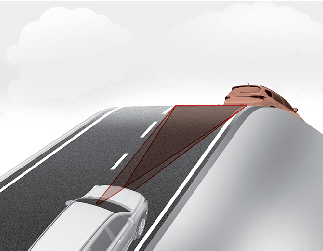
Under kørsel op ad bakke eller ned ad bakke opdager Smart Cruise Control muligvis ikke et køretøj i bevægelse i din bane og får dit køretøj til at accelerere til den indstillede hastighed. Køretøjets hastighed vil også hurtigt falde, når køretøjet foran bliver pludselig detekteret.
Vælg den korrekte indstillede hastighed på stigninger, og anvend bremsepedalen eller gaspedalen i henhold til vej- og kørselsforholdene fremad.
-
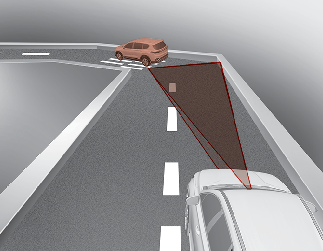
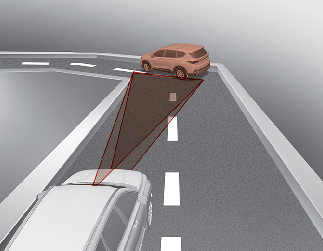
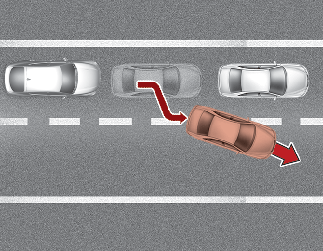
Skift af baner
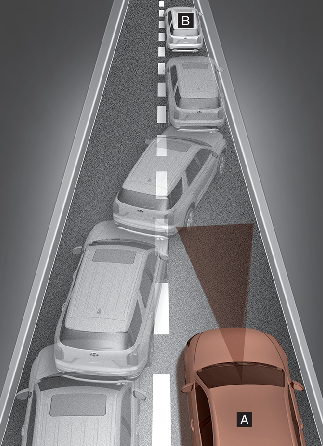
[A]: Dit køretøj, [B]: Baneskift køretøj
Når et køretøj bevæger sig ind i din bane fra en tilstødende bane, kan det ikke registreres af sensoren, før det er inden for sensorens registreringsrækkevidde.
Smart Cruise Control kan muligvis ikke umiddelbart registrere køretøjet, når køretøjet skifter baner pludseligt. I dette tilfælde skal du opretholde en sikker bremselængde, og om nødvendigt trykke på bremsepedalen for at reducere din kørehastighed for at opretholde en sikker afstand.
-
Registrering af køretøj
I følgende tilfælde kan nogle køretøjer i din bane ikke registreres af sensoren:
-
Køretøjer forskudt til den ene side
-
Langsomt bevægelige køretøjer eller pludselig decelererende køretøjer
-
Kommende køretøjer
-
Stoppede køretøjer
-
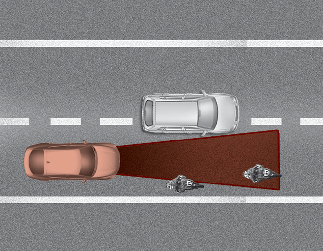
Køretøjer med lille bagprofil, såsom trailere
-
Smalle køretøjer, såsom motorcykler eller cykler
-
Specielle køretøjer
-
Dyr og fodgængere
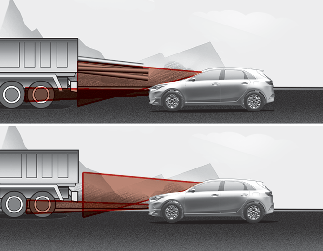
I de følgende tilfælde kan køretøjet foran ikke detekteres af sensoren:
-
Køretøjer med højere frihøjde eller køretøjer med last, der stikker ud af køretøjets bagside
-
Køretøjer, der har fronten løftet på grund af store belastninger
-
Du styrer dit køretøj
-
Kørsel på smalle eller skarpt buede veje
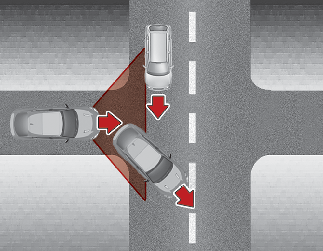
Når et køretøj foran forsvinder ved et kryds, kan dit køretøj muligvis accelerere. Vær altid opmærksom på vej- og kørselsforhold, mens du kører.
Når et køretøj foran dig smelter ud af banen, kan Smart Cruise Control muligvis ikke straks registrere det nye køretøj, der nu er foran dig. Vær altid opmærksom på vej- og kørselsforhold, mens du kører.
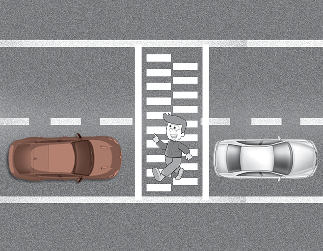
Se altid efter fodgængere, når dit køretøj holder afstand med køretøjet foran.