Ograniczenia funkcji
W niektórych sytuacjach przedni czujnik radarowy lub kamera przednia mogą nie wykryć pojazdu z przodu. W tych przypadkach system FCA może działać nieprawidłowo. Kierowca musi zachować szczególną ostrożność w sytuacjach opisanych poniżej, w których działanie systemu FCA może być ograniczone.
Działanie czujnika może być ograniczone w następujących sytuacjach:
-
Funkcja może nie działać przez 15 sekund od uruchomienia pojazdu lub kamery przedniej.
-
Przednia kamera i przedni radar zanieczyszczone lub zasłonięte.
-
Obiektyw kamery jest zasłonięty przez przyciemnienie, folię lub powłokę na szybie przedniej, uszkodzoną szybę lub inne przedmioty (np. naklejkę, owada itd.) na szybie.
-
Niekorzystne warunki atmosferyczne, takie jak intensywne opady deszczu lub śniegu ograniczające pole widzenia czujnika radarowego lub kamery.
-
Zakłócenia spowodowane falami elektromagnetycznymi.
-
Znaczne nieregularne odbicia od czujnika radarowego.
-
Wykrywanie przez kamerę/czujnik radarowy jest ograniczone.
-
Pojazd poprzedzający jest zbyt mały, aby można było go wykryć. (Np. motocykl itp.)
-
Pojazd z przodu lub jego przyczepa są zbyt duże, aby mogły zostać wykryte przez funkcję kamery monitorującej. (Np. przyczepa traktora itp.)
-
Pole widzenia kamery jest słabo oświetlone (jest zbyt ciemne, zawiera zbyt dużo refleksów lub podświetlenie, które ogranicza pole widzenia).
-
Pojazd z przodu nie ma świateł tylnych, ma wyłączone światła tylne lub są one umieszczone w nietypowym miejscu.
-
Jasność oświetlenia na zewnątrz nagle się zmienia, np. przy wjeżdżaniu do tunelu lub wyjeżdżaniu z niego.
-
Odbicie światła latarni ulicznych albo pojazdów nadjeżdżających z naprzeciwka na mokrej powierzchni drogi, np. od kałuży.
-
Intensywne światło słoneczne lub światło reflektorów pojazdu nadjeżdżającego z naprzeciwka w polu widzenia kamery.
-
Szyba przednia jest zaparowana, a droga jest słabo widoczna.
-
Nierówna jazda pojazdu poprzedzającego.
-
Pojazd znajduje się na drodze nieutwardzonej, na nierównej nawierzchni lub na drodze o nagłych zmianach nachylenia.
-
Znaczne nieregularne odbicia od czujnika radarowego.
-
Wykrywanie przez kamerę/czujnik radarowy jest ograniczone.
-
Pojazd poprzedzający jest zbyt mały, aby można było go wykryć. (Np. motocykl itp.)
-
Pojazd z przodu lub jego przyczepa są zbyt duże, aby mogły zostać wykryte przez funkcję kamery monitorującej. (Np. przyczepa traktora itp.)
-
Pole widzenia kamery jest słabo oświetlone (jest zbyt ciemne, zawiera zbyt dużo refleksów lub podświetlenie, które ogranicza pole widzenia).
-
Pojazd z przodu nie ma świateł tylnych, ma wyłączone światła tylne lub są one umieszczone w nietypowym miejscu.
-
Jasność oświetlenia na zewnątrz nagle się zmienia, np. przy wjeżdżaniu do tunelu lub wyjeżdżaniu z niego.
-
Odbicie światła latarni ulicznych albo pojazdów nadjeżdżających z naprzeciwka na mokrej powierzchni drogi, np. od kałuży.
-
Intensywne światło słoneczne lub światło reflektorów pojazdu nadjeżdżającego z naprzeciwka w polu widzenia kamery.
-
Szyba przednia jest zaparowana, a droga jest słabo widoczna.
-
Nierówna jazda pojazdu poprzedzającego.
-
Pojazd znajduje się na drodze nieutwardzonej, na nierównej nawierzchni lub na drodze o nagłych zmianach nachylenia.
-
Samochód często jeździ w pobliżu obszarów, w których powietrze zawiera metale, np. w pobliżu obszaru budów, autostrad itp.
-
Pojazd porusza się wewnątrz budynku, np. po podziemnym parkingu.
-
Kamera nie rozpoznaje całego pojazdu z przodu.
-
Kamera jest uszkodzona.
-
Jasność oświetlenia na zewnątrz jest zbyt niska, np. gdy reflektory w nocy są wyłączone lub pojazd przejeżdża przez tunel.
-
Na drogę padają cienie z pasa rozdzielającego jezdnie, z drzew itd.
-
Pojazd przejeżdża przez bramkę poboru opłat.
-
Szyba przednia jest zaparowana, a droga jest słabo widoczna.
-
Tył poprzedzającego pojazdu jest słabo widoczny. (Pojazd skręca w innym kierunku lub wywrócił się).
-
Trudne warunki drogowe powodują nadmierne drgania podczas jazdy.
-
Gwałtowna zmiana w działaniu czujnika na skutek najechania na próg zwalniający.
-
Pojazd poprzedzający porusza się poprzecznie do kierunku jazdy.
-
Pojazd poprzedzający stoi prostopadle do kierunku jazdy.
-
Pojazd z przodu porusza się w stronę pojazdu użytkownika lub cofa.
-
Pojazd użytkownika znajduje się na rondzie, a pojazd poprzedzający porusza się po łuku.
Jazda po łuku
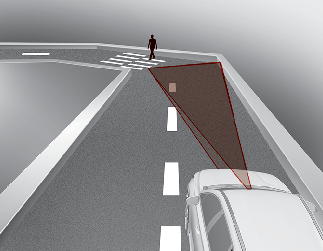
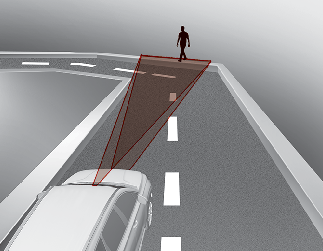
Skuteczność systemu wykrywania ryzyka kolizji (FCA) może być ograniczona podczas jazdy po krętych drogach.
Funkcja kamery przedniej lub czujnika radarowego może nie wykryć pojazdu poprzedzającego, pieszego lub rowerzysty z przodu na krętej drodze.
Może to skutkować brakiem alarmu lub hamowania, gdy jest to konieczne.
Podczas prowadzenia samochodu należy zawsze zwracać uwagę na drogę oraz warunki jazdy i w razie konieczności należy wcisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości.
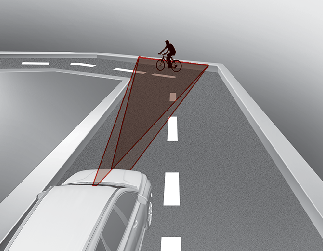
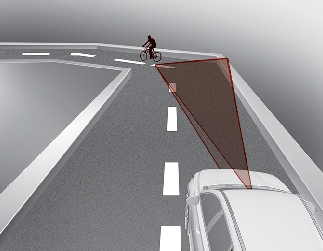
Podczas jazdy po krętej drodze system wykrywania ryzyka kolizji (FCA) może wykryć pojazd, pieszego lub rowerzystę poruszających się sąsiednim pasem ruchu lub poza pasem ruchu.
W takim przypadku funkcja może wyemitować fałszywy alarm i rozpocząć hamowanie.
Podczas prowadzenia samochodu należy zawsze zwracać uwagę na drogę oraz warunki jazdy.
Jazda po pochyłości
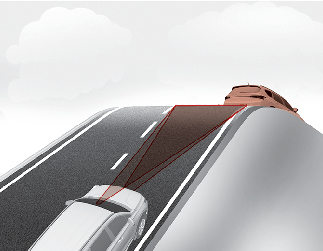
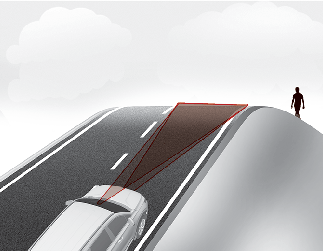
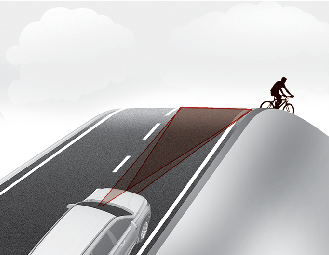
Skuteczność systemu wykrywania ryzyka kolizji (FCA) może być mniejsza podczas jazdy w górę lub w dół wzniesienia. Kamera monitorująca z przodu lub czujnik radarowy może nie wykryć pojazdu, pieszego lub rowerzysty z przodu.
Może to skutkować fałszywym alarmem i hamowaniem, a także brakiem alarmu lub hamowania, gdy jest to konieczne.
Gdy podczas jazdy po wzniesieniu funkcja nagle wykryje pojazd, pieszego lub rowerzystę z przodu, kierowca może odczuć gwałtowną redukcję prędkości.
Należy zawsze patrzeć przed siebie podczas jazdy w górę lub w dół i w razie konieczności naciskać pedał hamulca, aby zmniejszyć prędkość w celu zachowania bezpiecznej odległości.
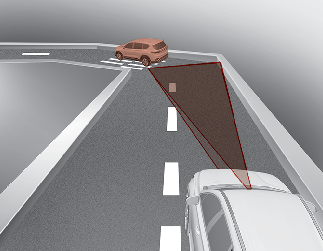
Zmiana pasa ruchu

[A]: pojazd użytkownika, [B]: pojazd zmieniający pas ruchu
Gdy pojazd z przodu zmienia pas ruchu, system FCA może nie wykryć go od razu, szczególnie gdy zmiana pasa ruchu odbywa się w sposób nagły. W takiej sytuacji należy zachować odległość wystarczającą do bezpiecznego hamowania i w razie potrzeby nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości.
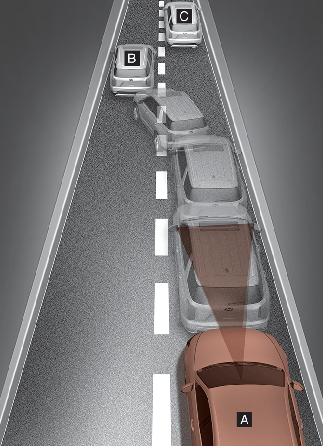
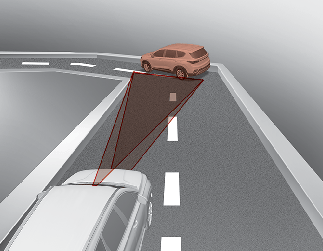
[A]: pojazd użytkownika, [B]: pojazd zmieniający pas ruchu, [C]: pojazd na tym samym pasie ruchu
Podczas jazdy w warunkach częstego zatrzymywania się i ruszania, gdy pojazd poprzedzający zmieni pas ruchu na inny, system FCA może nie wykryć od razu nowego pojazdu przed samochodem użytkownika. W takiej sytuacji należy zachować odległość wystarczającą do bezpiecznego hamowania i w razie potrzeby nacisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania bezpiecznej odległości.
Rozpoznawanie pojazdów
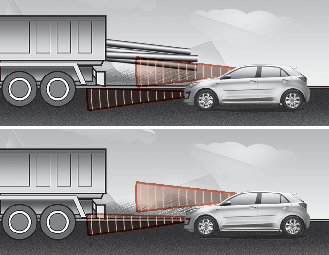
Gdy pojazd jadący z przodu przewozi ładunek znacznie wystający do tyłu lub pojazd jadący z przodu ma duży prześwit, stwarza to niebezpieczną sytuację. Podczas prowadzenia samochodu należy zawsze zwracać uwagę na drogę oraz warunki jazdy i w razie konieczności należy wcisnąć pedał hamulca, aby zmniejszyć prędkość jazdy w celu zachowania odległości.