Fonctionnement du régulateur de vitesse intelligent basé sur la navigation
Conditions de fonctionnement
Le contrôle de conduite intelligente basé sur la navigation est prêt à fonctionner si toutes les conditions suivantes sont remplies :
-
Le régulateur de vitesse intelligent est activé
-
Conduite sur les routes principales des autoroutes

Pour plus de détails sur l'utilisation du régulateur de vitesse intelligent, reportez-vous à Plus de détails
Affichage et contrôle
Lorsque le contrôle de conduite intelligente basé sur la navigation est activé, il s'affiche sur le tableau de bord comme suit :
Mise en veille du régulateur de vitesse intelligent basé sur la navigation
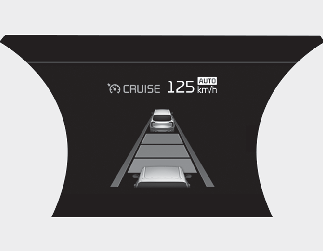
Si les conditions d’utilisation sont remplies, le témoin blanc  s’allume.
s’allume.
Fonctionnement du régulateur de vitesse intelligent basé sur la navigation
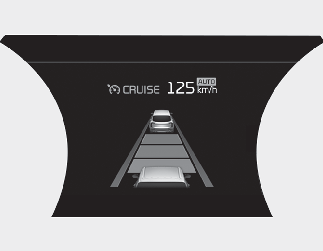
Si une décélération temporaire est requise à l’état de veille et que le contrôle de navigation du régulateur de vitesse est
en fonction, le témoin lumineux vert s’allumera sur le tableau de bord.

Le message d’avertissement « Drive carefully » (Conduit prudemment) apparaîtra dans les conditions suivantes :
-
Le contrôle de conduite intelligente basé sur la navigation ne peut pas assurer le ralentissement de votre véhicule à une vitesse sécuritaire
La fonction de décélération automatique en zone de virage sur l’autoroute utilise le même symbole ().
Décélération automatique au virage sur autoroute
-
En fonction du virage devant vous sur l’autoroute le véhicule ralentit et, une fois le virage franchi, accélère à la vitesse définie par le régulateur de vitesse intelligent.
-
Le temps de décélération du véhicule peut varier en fonction de la vitesse du véhicule et du degré du virage sur la route. Plus la vitesse de conduite est élevée, plus le véhicule décélère rapidement.
Limites du régulateur de vitesse intelligent basé sur la navigation
Le contrôle de conduite intelligente basé sur la navigation peut ne pas fonctionner normalement dans les conditions suivantes :
-
La navigation ne fonctionne pas correctement.
-
La navigation n'est pas mise à jour pour inclure les dernières informations sur la courbure de la route et les modifications.
-
La limite de vitesse et les informations routières ne sont pas mises à jour dans la navigation
-
Les informations cartographiques et la route réelle ne correspondent pas en raison des données GPS en temps réel ou d'une erreur d'informations cartographiques
-
La navigation recherche un itinéraire pendant que vous conduisez
-
Les signaux du GPS sont bloqués dans certaines zones telles qu'un tunnel
-
Une route qui se scinde en deux ou plusieurs routes et se rejoint à nouveau
-
Le conducteur s'écarte de la route définie dans la navigation
-
Le trajet vers la destination est modifié ou annulé en réinitialisant la navigation (y compris le changement de Kia LIVE)
-
La navigation ne peut pas détecter la position actuelle du véhicule (ex : routes surélevées, y compris un passage supérieur, adjacentes aux routes générales ou des routes voisines parallèles existent)
-
Le véhicule pénètre dans une station service ou une zone de repos
-
La limite de vitesse de certains tronçons change en fonction de la situation routière
-
Android Auto ou Car Play est en cours de fonctionnement
-
La navigation est mise à jour pendant la conduite
-
La navigation est réinitialisée pendant la conduite
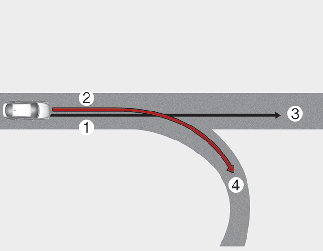
[1] : Itinéraire de conduite, [2] : Définir l’itinéraire, [3] : Route principale, [4] : Ligne de dérivation
-
Si l'itinéraire de navigation défini (ligne de dérivation) est différent de l'itinéraire de conduite (route principale), la fonction de ralentissement automatique de la zone de virage sur l’autoroute peut ne pas fonctionner tant que l'itinéraire de conduite n'est pas reconnu comme route principale.
-
Lorsque l'itinéraire de conduite du véhicule est reconnu comme route principale en maintenant la route principale au lieu de l'itinéraire défini pour la navigation, la fonction de ralentissement automatique de la zone de virage sur l’autoroute fonctionne. Selon la distance au virage et la vitesse actuelle du véhicule, la décélération du véhicule peut ne pas être suffisante ou ralentir rapidement.
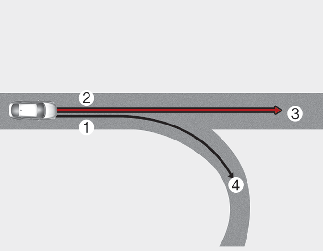
[1] : Itinéraire de conduite, [2] : Route principale, [3] : Définir l’itinéraire, [4] : Ligne de dérivation
-
En cas de différence entre l’itinéraire de navigation (route principale) et l’itinéraire de conduite (ligne de dérivation), la fonction de ralentissement automatique de la courbe sur l’autoroute peut fonctionner temporairement en raison des informations de navigation de la section de courbe de l’autoroute.
-
Lorsqu'il est jugé que vous conduisez hors de l’itinéraire parce que vous entrez dans l’échangeur ou la jonction d'autoroute, la fonction de ralentissement automatique de la zone de virage sur l'autoroute ne fonctionne pas.
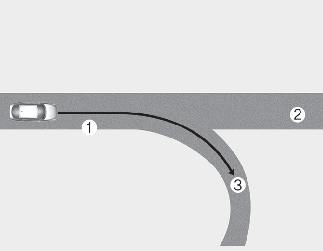
[1] : Itinéraire de conduite, [2] : Route principale, [3] : Ligne de dérivation
-
Si la destination n’est pas définie sur la navigation, la fonction de ralentissement automatique de la zone de virage sur l’autoroute s’active en fonction des informations liées au virage qui se trouve sur la route principale.
-
Même si vous quittez la route principale, la fonction de ralentissement automatique de la zone de courbe d'autoroute peut fonctionner temporairement en raison des informations de navigation de la section de courbe d'autoroute.
-
Le contrôle de conduite intelligente basé sur la navigation n'est pas un substitut aux pratiques de conduite sécuritaires, mais n'est qu'une fonction de commodité. Gardez toujours les yeux sur la route. Il est de la responsabilité du conducteur d'éviter d’enfreindre le code de la route.
-
Les informations en matière de limitation de vitesse du tableau de navigation peuvent différer des informations de limitation de vitesse réelles sur la route. Il est de la responsabilité du conducteur de vérifier la limite de vitesse appliquée sur la route ou sur la voie de circulation réelle.
-
Le ralentissement automatique en courbe sur l’autoroute s’annule automatiquement lorsque vous quittez la route principale de l’autoroute. Lorsque vous conduisez, soyez toujours attentif à l’état de la route et aux conditions de conduite.
-
Le contrôle de conduite intelligente basé sur la navigation peut ne pas fonctionner en raison de la présence de véhicules de tête et des conditions de conduite du véhicule. Lorsque vous conduisez, soyez toujours attentif à l’état de la route et aux conditions de conduite.
-
Lorsque vous tirez une remorque ou un autre véhicule, nous vous recommandons de désactiver le contrôle de conduite intelligente basé sur la navigation pour des raisons de sécurité.
-
Après avoir franchi un péage sur une autoroute, le régulateur de vitesse intelligent basé sur la navigation fonctionne en fonction de la première voie. Si vous entrez dans une des autres voies, la fonction pourrait ne pas décélérer correctement.
-
Le véhicule accélèrera si le conducteur appuie sur la pédale d'accélérateur pendant que le « Navigation-based Smart Cruise Control » (Contrôle de conduite intelligente basé sur la navigation) est activé, et le système ne forcera pas le décélération du véhicule. Cependant, si la pédale d’accélérateur n’est pas suffisamment enfoncée, le véhicule peut ralentir.
-
Si le conducteur accélère et relâche la pédale d'accélérateur pendant que le contrôle de conduite intelligente basé sur la navigation est activé, le véhicule peut ne pas ralentir suffisamment ou rapidement à une vitesse sûre.
-
Si le virage est trop grand ou trop petit, le contrôle de conduite intelligente basé sur la navigation peut ne pas fonctionner.
-
Lorsque la fonction est activée, le véhicule décélère automatiquement avant d'atteindre la route en courbe en fonction de sa courbure, et la vitesse de conduite revient à la vitesse fixée par le régulateur de vitesse intelligent après avoir passé la section en courbe.
-
Les informations liées à la vitesse qui apparaissent sur le tableau de bord peuvent différer de celles qui s’affichent sur la navigation.
-
Il peut y avoir un intervalle de temps entre le guidage de la navigation et le moment où le contrôle de conduite intelligente basé sur la navigation démarre et cesse de fonctionner.
-
Même si vous conduisez à une vitesse inférieure à la vitesse réglée sur le régulateur de vitesse intelligent, l’accélération peut être limitée par les sections de courbe ultérieures.
-
Si le « Navigation-based Smart Cruise Control » (Contrôle de conduite intelligente basé sur la navigation) fonctionne au moment où vous quittez la route principale pour vous engager dans un échangeur, une intersection, une aire de repos, etc., le système pourrait continuer de fonctionner pendant un certain temps.
-
La décélération exécutée par le contrôle de conduite intelligente basé sur la navigation peut ne pas être suffisante en raison de l’état de la route, comme par exemple une chaussée irrégulière, des voies étroites, etc.