Limitaciones de la función
El control de crucero inteligente puede tener limitaciones en la detección de la distancia hasta el vehículo que le precede debido a las condiciones de la carretera y el tráfico.
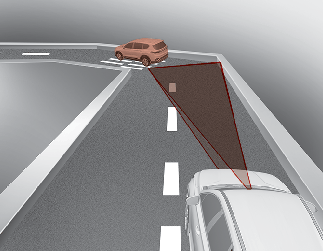
Conducción en una curva
-
Es posible que el control de crucero inteligente no detecte un vehículo que se desplaza en su carril y entonces su vehículo podría acelerar hasta la velocidad fijada. Asimismo, la velocidad del vehículo disminuirá cuando se detecte de pronto el vehículo que le precede.
-
Seleccione una velocidad fijada adecuada en curvas y accione los frenos o el pedal del acelerador si es necesario.
La velocidad de su vehículo podría verse reducida por un vehículo en el carril adyacente.

Pise el pedal del acelerador y seleccione la velocidad de ajuste adecuada. Asegúrese de que las condiciones de la carretera permitan un funcionamiento seguro del control de crucero inteligente.
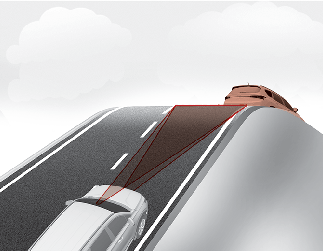
Conducción por una pendiente
-
Durante la conducción en cuestas hacia arriba o hacia abajo, el control de crucero inteligente podría no detectar el vehículo que se desplaza por su carril y su vehículo podría acelerar hasta la velocidad fijada. Además, la velocidad del vehículo se reducirá cuando se reconozca el vehículo que está delante de forma repentina.
-
Seleccione una velocidad fijada adecuada en cuestas y accione los frenos o el pedal del freno si es necesario.
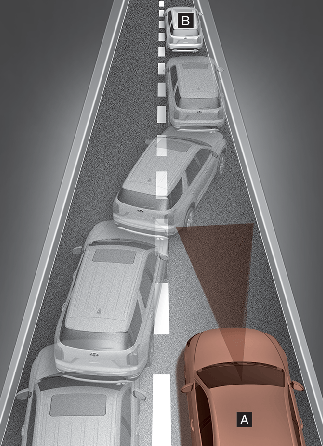
Cambio de carril
-
Un vehículo que se introduzca en su carril desde un carril adyacente no puede ser reconocido por el sensor hasta que esté entre dentro de la zona de detección del sensor.
-
El radar podría no detectar de inmediato que un vehículo le adelanta de repente. Preste siempre atención al tráfico y las condiciones de conducción y de la carretera.
-
Si un vehículo más lento entra en su carril, es posible que la velocidad se reduzca para mantener la distancia respecto al vehículo que le precede.
-
Si un vehículo más rápido entra en su carril, su vehículo acelerará a la velocidad fijada.
Reconocimiento del vehículo

Algunos vehículos que le preceden podrían no ser reconocidos por el sensor si:
-
Son vehículos estrechos como motocicletas o bicicletas
-
El vehículo se desplaza hacia un lado
-
Los vehículos se mueven lentamente o desaceleran de forma repentina
-
Vehículos parados
-
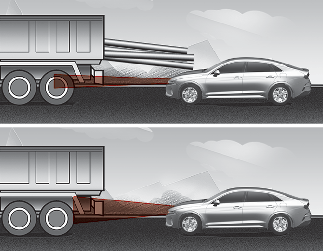
Vehículos con un pequeño perfil trasero, como los remolques sin carga
No es posible reconocer correctamente un vehículo que está delante mediante el sensor en los casos siguientes:
-
Cuando el vehículo está inclinado hacia arriba a causa de la sobrecarga en el compartimento de equipajes
-
Se está accionando el volante
-
Al conducir hacia un lado del carril
-
Al conducir en carriles estrechos o en curvas
Pise el pedal del freno o del acelerador si es necesario.

-
Su vehículo puede acelerar cuando el vehículo que le precede desaparece.
-
Si advierte que el vehículo que le precede no se detecta, conduzca con precaución.
-
Al conducir con un tráfico con paradas frecuentes, y un vehículo detenido que le precede confluye fuera del carril, es posible que la función no detecte inmediatamente el nuevo vehículo que ahora circula delante. En este caso, debe mantener una distancia segura de frenado y, si es necesario, pise el pedal del freno para reducir la velocidad de conducción para mantener una distancia segura.

-
Preste atención a la presencia de peatones cuando su vehículo mantenga una distancia determinada con respecto al vehículo que le precede.

-
Tenga siempre cuidado con los vehículos de mucho peso o que transporten cargas pesadas que sobresalgan por la parte trasera del vehículo.

Al usar el control de crucero inteligente, tome las precauciones siguientes:
-
Si es necesaria una parada de emergencia, debe pisar los frenos. Es posible que el control de crucero inteligente no pueda detener completamente el vehículo o evitar una colisión en cada situación.
-
Mantenga la distancia de seguridad según las condiciones de la carretera y la velocidad del vehículo. Si la distancia entre vehículos es demasiado corta al conducir a una velocidad elevada, podría producirse una grave colisión.
-
Mantenga siempre una distancia de frenada suficiente y desacelere su vehículo accionando los frenos si es necesario.
-
El control inteligente no puede reconocer un vehículo parado, ni peatones ni un vehículo que circule en sentido contrario.
Mire siempre hacia delante para evitar que ocurran situaciones inesperadas o repentinas.
-
Si los vehículos que le preceden cambian frecuentemente de carril, esto podría producir un retraso en la reacción de la función o provocar que la función reaccione ante un vehículo que en realidad está en un carril adyacente.
Conduzca siempre con cuidado para evitar que ocurran situaciones inesperadas o repentinas.
-
Tenga siempre en cuenta la velocidad seleccionada y la distancia entre vehículos. El conductor no debe confiar únicamente en la función, sino que debe prestar atención a las condiciones de conducción y controlar la velocidad del vehículo.
-
Ya que el control de crucero inteligente podría no reconocer situaciones de conducción complejas preste especial atención a las condiciones de conducción y controle la velocidad de su vehículo.
-
Para un funcionamiento seguro, lea con atención y siga las instrucciones que se proporcionan en este manual antes de su uso.
-
No utilice el control de crucero en pendientes inclinadas o al remolcar otro vehículo o remolque debido a que una carga extrema puede interferir con la capacidad del vehículo para mantener la velocidad seleccionada.
-
No utilice el control de crucero inteligente al remolcar el vehículo.

El control de crucero inteligente podría no funcionar temporalmente a causa de:
-
Interferencias eléctricas
-
Modificaciones en la suspensión
-
Diferencias en la abrasión del neumático o en la presión del neumático
-
Colocación de diferentes tipos de neumáticos