Ograničenja pametnog tempomata zasnovanog na navigaciji
Pametni tempomat zasnovan na navigaciji možda neće normalno raditi u sledećim okolnostima:
-
navigacija ne radi kako treba
-
informacije o mapi se ne prenose zbog nepravilnog rada infozabavnog sistema
-
ograničenja brzine i informacije o putevima u navigaciji nisu ažurirani
-
Informacije sa mape i stvarno stanje na putu razlikuju se zbog greške u podacima sa GPS-a ili u informacijama sa mape
-
navigacija traži putanju dok vozite
-
GPS signal nema domet, npr. u tunelu
-
put se razdvaja u jedan ili više puteva i ponovo spaja
-
vozač silazi sa putanje koju je odredila navigacija
-
putanja do odredišta je promenjena ili poništena zbog resetovanja navigacije
-
Vozilo je skrenulo na benzinsku pumpu ili odmorište
-
u funkciji su Android Auto ili Car Play
-
navigacija ne može da odredi trenutni položaj vozila (npr. izdignut put sa nadvožnjakom u blizini običnog puta ili postojanje više paralelnih puteva)
-
ažuriranje navigacije u toku vožnje
-
restartovanje navigacije u toku vožnje
-
ograničenje brzine na određenim deonicama menja se u skladu sa situacijom na putu
-
vožnja putem na kom se odvijaju radovi
-
vožnja kontrolisanim putem
-
loši vremenski uslovi poput mećave, pljuska i sl.
-
vožnja putem sa oštrim krivinama
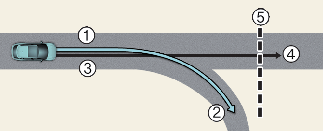
[1]: Zadavanje putanje, [2]: Odvajanje, [3]: Pravac kretanja, [4]: Glavni put, [5]: Sekcija vijugavog puta
-
Kada postoji razlika između putanje određene navigacijom (odvajanja) i pravca kretanja (glavi put), automatsko usporavanje na krivim deonicama autoputa možda neće raditi dok se putanja kretanja ne prepozna kao glavni put.
-
Kada se putanja kretanja vozila prepozna kao glavni put, ostajanjem na glavnom putu umesto praćenja putanje određene navigacijom, radiće funkcija automatskog usporavanja na krivim deonicama autoputa. U zavisnosti od krivine i trenutne brzine vozila, usporavanje možda neće biti dovoljno ili će biti naglo.
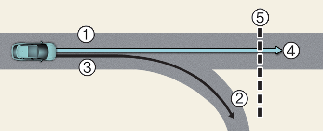
[1]: Glavni put, [2]: Odvajanje, [3]: Pravac kretanja, [4]: Zadavanje putanje, [5]: Sekcija vijugavog puta
-
Kada postoji razlika između putanje određene navigacijom (glavni put) i pravca kretanja (odvajanja), automatsko usporavanje na krivim deonicama autoputa privremeno će odreagovati na osnovu informacije o krivini na glavnom putu.
-
Ako se proceni da silazite sa putanje ulaskom na petlju autoputa ili na raskrsnicu, automatsko usporavanje na krivim deonicama autoputa neće funkcionisati.
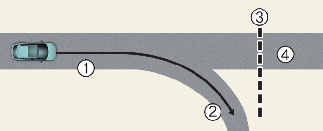
[1]: Pravac kretanja, [2]: Odvajanje, [3]: Sekcija vijugavog puta, [4]: Glavni put
-
Ako u navigaciji nije zadato odredište, automatsko usporavanje na krivim deonicama autoputa radiće na osnovu informacija o krivini na glavnom putu.
-
Čak i ako skrenete s glavnog puta, funkcija automatskog usporavanja na krivim deonicama autoputa može privremeno raditi zbog navigacionih informacija o deonici autoputa sa krivinom.

-
Pametni tempomat zasnovan na navigaciji nije zamena za bezbedno ponašanje u saobraćaju, već samo pomoćna funkcija. Uvek pazite na put i znajte da je vozač dužan da izbegava kršenje saobraćajnih propisa.
-
Informacije o ograničenju brzine iz navigacije mogu da se razlikuju od stvarnog ograničenja brzine na putu. Vozač je dužan da proveri ograničenje brzine na putu ili u saobraćajnoj traci kojom se kreće.
-
Pametni tempomat zasnovan na navigaciji automatski će obustaviti rad kada siđete sa glavnog dela autoputa (ili puta rezervisanog za motorna vozila). Uvek pazite na put i uslove u saobraćaju dok vozite.
-
Pametni tempomat zasnovan na navigaciji možda neće raditi zbog postojanja vozila ispred ili načina vožnje vozila. Uvek pazite na put i uslove u saobraćaju dok vozite.
-
Kada vučete prikolicu ili drugo vozilo preporučujemo da se pametni tempomat zasnovan na navigaciji isključi iz bezbednosnih razloga.
-
Nakon što prođete naplatnu rampu na autoputu, pametni tempomat zasnovan na navigaciji radiće na osnovu leve trake. Ako pređete u neku drugu traku, funkcija možda neće raditi kako treba.
-
Vozilo će ubrzati ako vozač pritisne gas dok je pametni tempomat zasnovan na navigaciji aktivan i funkcija neće usporavati vozilo. Međutim, ako se papučica gasa nedovoljno pritisne, može se desiti da vozilo uspori.
-
Ako vozač ubrza i pusti papučicu gasa dok je pametni tempomat zasnovan na navigaciji aktivan, vozilo možda neće dovoljno usporiti ili će naglo usporiti do bezbedne brzine.
-
Ako je krivina previše oštra ili blaga, pametni tempomat zasnovan na navigaciji možda se neće aktivirati.

-
Informacije o brzini na instrument tabli i u navigaciji mogu da se razlikuju.
-
Moguće je da će postojati vremenski razmak između davanja usmerenja navigacije i početka i završetka rada pametnog tempomata zasnovanog na navigaciji.
-
Čak i ako vozite brzinom manjom od zadate brzine pametnog tempomata, ubrzanje može biti ograničeno zbog krivina ispred vas.
-
Ako pametni tempomat zasnovan na navigaciji radi dok sa glavnog puta silazite na petlju, raskrsnicu, odmorište i sl, funkcija će možda nastaviti da radi neko vreme.
-
Usporavanje pametnog tempomata zasnovanog na navigaciji može da deluje nedovoljno zbog uslova na putu poput neravnina, uskih saobraćajnih traka i sl.