Limitaciones del control de crucero inteligente basado en la navegación
Es posible que el control de crucero inteligente basado en la navegación no funcione correctamente en las circunstancias siguientes:
-
La navegación no funciona correctamente
-
El límite de velocidad y la información sobre la carretera no se actualizan en la navegación
-
La información del mapa no se transmite debido al funcionamiento anómalo del sistema de infoentretenimiento
-
La información del mapa y la carretera real son diferentes debido a los datos de GPS en tiempo real o al error de la información en el mapa
-
La navegación busca una ruta mientras conduce
-
Las señales del GPS se bloquean en zonas como un túnel
-
Una carretera que se divide en dos o más carreteras y se une de nuevo
-
El conductor se desvía de la ruta establecida en la navegación
-
La ruta que conduce al destino se modifica o cancela mediante el reinicio de la navegación
-
El vehículo accede a un área de servicio o de descanso.
-
Android Auto o Car Play están en funcionamiento.
-
La navegación no puede detectar la posición actual del vehículo (por ejemplo, hay carreteras elevadas que incluyen un paso elevado adyacente a carreteras generales o cercanas de manera paralela)
-
Durante la conducción, se actualiza la navegación
-
Durante la conducción, se reinicia la navegación
-
El límite de velocidad de algunos tramos cambia en función del estado de la carretera
-
Conducción por una carretera en obras
-
Conducción por una carretera controlada
-
En condiciones meteorológicas adversas, como fuertes lluvias y nieve intensa.
-
Conducción por una carretera con curvas muy pronunciadas
-
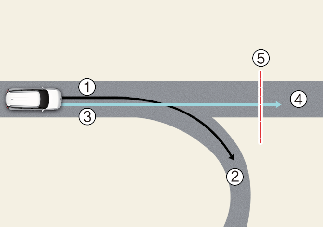
Ruta fijada
-
Línea de bifurcación
-
Ruta de conducción
-
Carretera principal
-
Tramo de la carretera con curvas
-
Cuando hay una diferencia entre la ruta de navegación establecida (línea de bifurcación) y la ruta de conducción (carretera principal), es posible que la función de autodeceleración en zona de curvas en autopista no funcione hasta que la ruta de conducción se reconozca como la carretera principal.
-
Cuando la ruta de conducción del vehículo se reconoce como la carretera principal al seguir por la carretera principal en lugar de la ruta establecida de navegación, se activará la función de autodeceleración en zona de curvas en autopista. Dependiendo de la distancia hasta la curva y la velocidad actual del vehículo, es posible que la desaceleración del vehículo no sea suficiente o desacelere rápidamente.
-
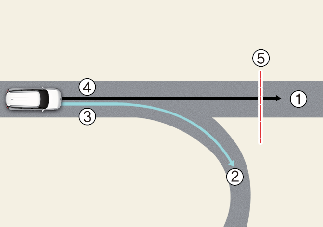
Carretera principal
-
Línea de bifurcación
-
Ruta de conducción
-
Ruta fijada
-
Tramo de la carretera con curvas
-
Cuando hay una diferencia entre la ruta de navegación fijada (carretera principal) y la ruta de conducción (ramal), la función de autodeceleración en zona de curvas en autopista funcionará temporalmente basándose en la información de las curvas de la carretera principal.
-
Cuando se considera que se ha desviado de la ruta al acceder a autopistas, cruces o áreas de descanso, la función de autodeceleración en zona de curvas en autopista no se activará.
-
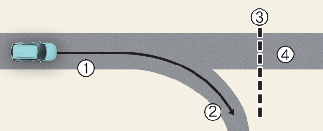
Ruta de conducción
-
Línea de bifurcación
-
Tramo de la carretera con curvas
-
Carretera principal
-
Si no se ha establecido un destino en la navegación, la función de autodeceleración en zona de curvas en autopista se accionará según la información de la curva en la carretera principal.
-
Incluso si se desvía de la carretera principal, la función de autodesaceleración en zona de curvas en autopista puede accionarse de forma temporal debido a la información de navegación del tramo de curvas de la autopista.

-
El control de crucero inteligente basado en la navegación no sustituye las prácticas de conducción seguras; se trata de una función complementaria. Mantenga siempre la vista en la carretera. El conductor es responsable de evitar infringir el código de circulación.
-
La información del límite de velocidad de la navegación puede diferir de la información del límite de velocidad real en la carretera. Es responsabilidad del conductor verificar el límite de velocidad en la carretera o en el carril de conducción reales.
-
El control de crucero inteligente basado en la navegación se cancelará automáticamente si el tipo de carretera cambia al entrar en una carretera general debajo de la carretera nacional, un área de descanso en una carretera dedicada o una carretera de entrada/salida (IC/JC), etc., mientras se conduce en la carretera principal en una carretera dedicada. Preste siempre mucha atención
-
Es posible que el control de crucero inteligente basado en la navegación no funcione debido a la presencia de vehículos que le preceden y a las situaciones de conducción del vehículo. Preste siempre atención a la carretera y a las condiciones de la conducción.
-
Al arrastrar un remolque o algo similar, es posible que la desaceleración del vehículo no sea suficiente. Conduzca siempre con cuidado.
-
Después de pasar por una barrera de peaje en una autopista (o autovía), el control de crucero inteligente basado en la navegación se accionará en función del primer carril. Si accede a uno de los otros carriles, el control de crucero inteligente basado en la navegación es posible que no funcione correctamente.
-
El vehículo se acelerará si el conductor pisa el pedal del acelerador mientras el control de crucero inteligente basado en la navegación está en funcionamiento y la función no desacelerará el vehículo. Sin embargo, si el pedal del acelerador no se pisa lo suficiente, el vehículo podría reducir la velocidad.
-
Si el conductor acelera y suelta el pedal del acelerador mientras el control de crucero inteligente basado en la navegación está en funcionamiento, es posible que el vehículo no desacelere lo suficiente o desacelere rápidamente hasta una velocidad segura.
-
Si la curva es demasiado grande o demasiado pequeña, es posible que el control de crucero inteligente basado en la navegación no funcione.
-
El control de crucero inteligente basado en la navegación es una función complementaria y no sustituye a una conducción segura. Es responsabilidad del conductor comprobar siempre la velocidad y la distancia con el vehículo que lo precede. Conduzca siempre de manera segura y con precaución.

-
Podría producirse un intervalo de tiempo entre la guía de navegación y el inicio y la finalización de la operación de control de crucero inteligente basado en la navegación.
-
La información de velocidad en el tablero y la navegación pueden diferir.
-
Incluso si conduce a una velocidad inferior a la velocidad fijada por el control de crucero inteligente, la aceleración podría verse limitada por los tramos de curvas que se encuentran más adelante.
-
Si el control de crucero inteligente basado en la navegación está en funcionamiento mientras abandona la carretera principal para acceder a un enlace de autopistas, cruce, área de descanso, etc., la función se podría accionar durante un cierto periodo de tiempo.
-
La desaceleración por parte del control de crucero inteligente basado en la navegación puede que no se note lo suficiente debido a las condiciones de la carretera, como superficies irregulares y carriles estrechos.